CK3M i CK5M
Programowalny sterownik wieloosiowy
Sterowanie wieloosiowe z najkrótszym czasem cyklu pracy serwomechanizmu (50 µs / 5 osi) umożliwia precyzyjną obróbkę
- Lokalne osie zapewniające precyzję w nanoskali
- Bardzo wysoka prędkość synchronicznego sterowania (50 µs / 5 osi)
- Niestandardowe algorytmy serworegulacji
- Elastyczność stosowania elementów wykonawczych i enkoderów od różnych dostawców
- Zwiększona elastyczność w zakresie programowania w języku G-Code, ANSI-C lub języku oryginalnym
- Sieć EtherCAT zapewniająca elastyczną konfigurację
- Modułowa konstrukcja i montaż na szynie DIN
Modele i specyfikacja
| Produkt | Type of module | CPU clock frequency | Max. number of axes via EtherCAT | Max. number of axis interface units | Amplifier interface | Encoder interface | Digital output type | Number of digital inputs | Number of digital outputs | Number of analog inputs | Opis | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
|
|
CK3M Motion Control CPU | 1.0 GHz | 0 | 4 | 0 | 0 | 0 | CK3M CPU, 1 GB RAM, 1 GB Flash, No EtherCAT. Up to two axis interface units can be connected. Expansion units can be connected. |
|
|||
|
|
CK3M Motion Control CPU | 1.0 GHz | 4 | 4 | 0 | 0 | 0 | CK3M CPU, 1 GB RAM, 1 GB Flash, 4 EtherCAT axes. Up to two axis interface units can be connected. Expansion units can be connected. |
|
|||
|
|
CK3M Motion Control CPU | 1.0 GHz | 8 | 4 | 0 | 0 | 0 | CK3M CPU, 1 GB RAM, 1 GB Flash, 8 EtherCAT axes. Up to two axis interface units can be connected. Expansion units can be connected. |
|
|||
|
|
Analog I/O | 4 | CK3W Analog IN, 4 points, +/-10 V, 16 bit (full scale) |
|
||||||||
|
|
Analog I/O | 8 | CK3W Analog IN, 8 points, +/-10 V, 16 bit (full scale) |
|
||||||||
|
|
Axis interface | DirectPWM output | Digital quadrature / Serial | NPN | CK3W 4 Axis Interface Unit, Digital encoder, DirectPWM, NPN |
|
||||||
|
|
Axis interface | DirectPWM output | Digital quadrature / Serial | PNP | CK3W 4 Axis Interface Unit, Digital encoder, DirectPWM, PNP |
|
||||||
|
|
Axis interface | Filtered PWM | Digital quadrature / Serial | NPN | CK3W 4 Axis Interface Unit, DA output (Filtered PWM), Pulse + direction or phase difference, Pulse encoder / Serial encoder, NPN Output type |
|
||||||
|
|
Axis interface | Filtered PWM | Digital quadrature / Serial | PNP | CK3W 4 Axis Interface Unit, DA output (Filtered PWM), Pulse + direction or phase difference, Pulse encoder / Serial encoder, PNP Output type |
|
||||||
|
|
Axis interface | True DAC | Digital quadrature / Serial | NPN | CK3W 4 Axis Interface Unit, DA output (True DAC), Pulse + direction or phase difference, Pulse encoder / Serial encoder, NPN Output type |
|
||||||
|
|
Axis interface | True DAC | Digital quadrature / Serial | PNP | CK3W 4 Axis Interface Unit, DA output (True DAC), Pulse + direction or phase difference, Pulse encoder / Serial encoder, PNP Output type |
|
||||||
|
|
Axis interface | DirectPWM output | Sinusoidal / Serial | NPN | CK3W 4 Axis Interface Unit, Sinusoidal encoder, DirectPWM, NPN |
|
||||||
|
|
Axis interface | DirectPWM output | Sinusoidal / Serial | PNP | CK3W 4 Axis Interface Unit, Sinusoidal encoder, DirectPWM, PNP |
|
||||||
|
|
Encoder input | Not Applicable | Special Serial Protocol | Encoder Input Unit for CK3M, Serial encoder 4 channels, BiSS-C, Endat2.2, and R88M-1Lx/-1Mx Motor built-in encoder |
|
|||||||
|
|
Laser interface | Not Applicable | Not Applicable | PWM, XY2-100 | Laser Interface Unit for CK3M, XY2-100 Protocol, Laser PWM output |
|
||||||
|
|
Laser interface | Not Applicable | Not Applicable | PWM, TCR, XY2-100 | Laser Interface Unit for CK3M, XY2-100 Protocol, Laser PWM output and TCR Output |
|
||||||
|
|
Laser interface | Not Applicable | Not Applicable | PWM, SL2-100 | Laser Interface Unit for CK3M, SL2-100 Protocol, Laser PWM output |
|
||||||
|
|
Laser interface | Not Applicable | Not Applicable | PWM, SL2-100, TCR | Laser Interface Unit for CK3M, SL2-100 Protocol, Laser PWM output and TCR Output |
|
||||||
|
|
Digital I/O | NPN | 16 | 16 | CK3W Digital IO, IN/OUT:16/16, NPN |
|
||||||
|
|
Digital I/O | PNP | 16 | 16 | CK3W Digital IO, IN/OUT:16/16, PNP |
|
||||||
|
|
CK5M Motion Control CPU | 1.6 GHz | 16 | 8 | 0 | 0 | 0 | CK5M Quad Core 1040 CPU, 2 GB RAM, 4 GB Flash, 16 EtherCAT axes. Up to 8 axis interface units can be connected via Expansion units, max 32 axis local. |
|
|||
|
|
CK5M Motion Control CPU | 1.6 GHz | 32 | 8 | 0 | 0 | 0 | CK5M Quad Core 1040 CPU, 2 GB RAM, 4 GB Flash, 32 EtherCAT axes. Up to 8 axis interface units can be connected via Expansion units, max 32 axis local. |
|
Jak możemy Ci pomóc?
W razie pytań lub chęci przesłania prośby o wycenę skontaktuj się z nami lub wyślij zlecenie.
Proszę o kontakt CK3M i CK5M

Dziękujemy za wysłanie zapytania. Otrzymasz od nas odpowiedź tak szybko, jak to tylko będzie możliwe.
Problem techniczny. Akcja nie została wykonana. Przepraszamy - spróbuj ponownie.
DownloadOferta dla CK3M i CK5M
Poniżej możecie Państwo wysłać zapytanie cenowe dotyczące naszych produktów. Prosimy wypełnić wszystkie pola oznaczone *. Twoje dane osobowe będą oczywiście traktowane jako poufne.
Dziękujemy za zlecenie wyceny. Dostarczymy Ci niezbędnych informacji tak szybko, jak to tylko będzie możliwe.
Problem techniczny. Akcja nie została wykonana. Przepraszamy - spróbuj ponownie.
DownloadCechy

Modułowa konstrukcja
Modułowa konstrukcja umożliwia dowolne łączenie sterownika CK3M z maksymalnie dwiema jednostkami interfejsu osiowego w celu zapewnienia obsługi szerokiej gamy zastosowań.
Power PMAC IDE (zintegrowane środowisko programistyczne)
- Bazujące na Microsoft® Visual Studio®
- ANSI C lub oryginalny język programowania
- Łatwa regulacja
- Prosta zmiana ustawień
- Rozwiązywanie problemów
- Debuger
Złożona kinematyka
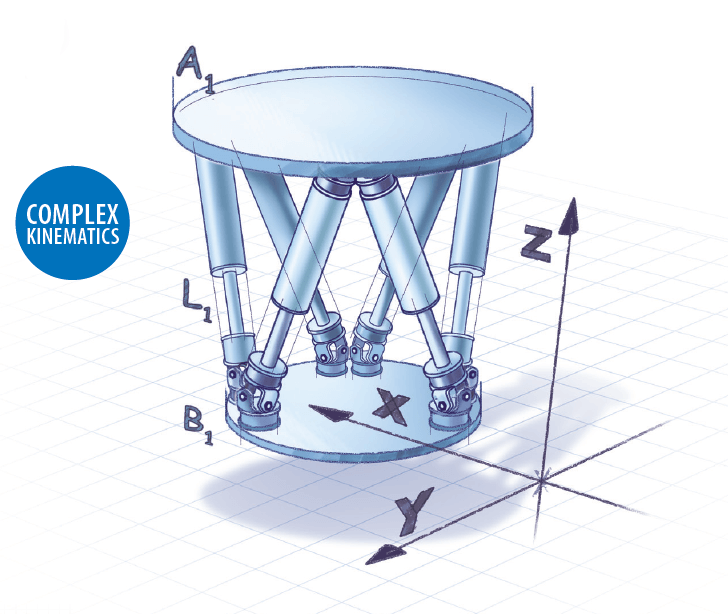
Możliwość sterowania złożonymi mechanizmami dzięki obsłudze zaawansowanej konwersji przestrzeni. Prostota sterowania w skomplikowanych zastosowaniach — na przykład pozycjonowaniu lustra teleskopu Hexapod — dzięki funkcji obsługi kinematyki.
Zaawansowane funkcje umożliwiające przeprowadzanie precyzyjnej obróbki
G-Code
Standardowy interpreter języka G-Code RS-274. Możliwość wykorzystywania języków G-, M-, T- i D-code w spersonalizowany sposób dzięki funkcji edycji podprogramów przez użytkownika. Swoboda dostosowywania składni i możliwość współpracy z dowolnym oprogramowaniem CAD/CAM.
Kompensacja obcinarki 2D/3D
Kompensacja średnicy i kształtu narzędzia sprawia, że punkt cięcia jest dokładnie taki, jaki został określony przez G-Code.
Szybki procesor i duży bufor programowy
Szybki procesor obsługujący ponad 10 000 bloków na sekundę oraz programy części o wielkości do 1 Gb.
Funkcja odwracania ścieżki Block Retrace
Możliwość odwrócenia ścieżki narzędzia w celu usunięcia go z obszaru cięcia.
Funkcja Advanced Block Lookahead
Instrukcje z bufora są analizowane z wyprzedzeniem, a ruchy łączone i optymalizowane pod względem prędkości i przyspieszenia w celu uzyskania lepszej wydajności.
Zarządzanie ścieżką styczną narzędzi
Narzędzia z kierunkiem cięcia wymagają pozycjonowania ścieżki stycznej.
Oprogramowanie
Power PMAC IDE
Oprogramowanie komputerowe do konfigurowania, tworzenia programów użytkownika oraz ich debugowania do programowalnych, wieloosiowych sterowników NY51-A, CK3E i CK3M.
Powiązane produkty
-

Programowany sterownik wieloosiowy CK3E
-

Wydajność i funkcjonalność sterowania maszyną
-

Uniwersalny serwonapęd Sysmac
Materiały









_getting_started_guide_en.jpg)