Pobieranie elementów z pojemników z wykorzystaniem robota współpracującego
Zapotrzebowanie na jakość i szybkość w zakresie pobierania elementów z pojemników jest niezwykle wysokie, ponieważ celem nie jest tylko dorównanie ludzkim możliwościom, ale wręcz ich przekroczenie!
Pobieranie elementów z pojemników stanowi złożone zadanie, ponieważ polega na pobieranie części, które są umieszczane w pojemniku w chaotyczny i losowy sposób, a obsługa wielu pojemników również jest dość skomplikowana.

Nasze rozwiązanie: koboty stanowiące odbiorców zamówień jako sposób na maksymalne zwiększenie wydajności.
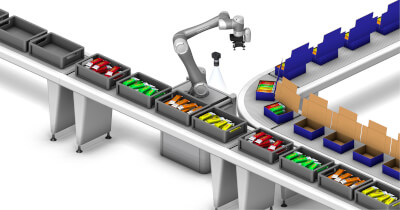
System pobierania elementów z pojemników zazwyczaj składa się z systemu wizyjnego maszyn 3D, manipulatora zautomatyzowanego i oprogramowania. Rozwiązanie to łączy w sobie inteligentny system kontroli wizyjnej z autonomiczną kontrolą ruchu.
Funkcja pobierania kobota wykorzystuje system wizyjny i narzędzia znajdujące na końcu ramienia do pobierania elementów z pojemników jeden po drugim.
Pozwala to robotom na wykrywanie i dopasowywanie przedmiotów niezależnie od ich orientacji.

Gwarancja wartości
- Zmniejszenie nakładów pracy podczas realizacji zamówień
- Lepsze rezultaty:
- Mniejsza liczba niepobranych przedmiotów
- Większa elastyczność
- Niższe koszty
- Mniejsze zapotrzebowanie na konserwację
- Obniżenie całkowitego kosztu posiadania.

Zadzwoń do nas
Skontaktuj się z lokalnym biurem sprzedażyZadaj pytanie
Odpowiedzi na większość pytań udzielamy się w ciągu 24 godzinFunkcja pobierania elementów z pojemników 3D
Pobieranie przedmiotów z losowych, nakładających się na siebie pozycji za pomocą systemu wizyjnego 3D, który umożliwia lepsze podnoszenie elementów z pojemników. System wizyjny 3D pozwala na wykrywanie bardziej złożonych przedmiotów w polu widzenia.
Dziękujemy za wysłanie zapytania. Otrzymasz od nas odpowiedź tak szybko, jak to tylko będzie możliwe.
Problem techniczny. Akcja nie została wykonana. Przepraszamy - spróbuj ponownie.
Download